|
Создан программно-технический комплекс для стабилизации и управления видеокамерой, расположенной на борту беспилотного летательного аппарата самолётного типа.
Введение Бурное развитие беспилотных летательных аппаратов позволяет решать либо до сих пор не решённые, либо очень затратные в стоимостном выражении задачи. В настоящее время в связи с миниатюризацией электронной техники стало возможным устанавливать на малые летательные аппараты различные измерительные приборы, а также фото и видео аппаратуру, позволяющую вести наблюдение в различных волновых диапазонах [1]. БПЛА имеют как гражданское, так и военное применение. Квадрокоптеры фиксируют тепловые потери в линиях электропередач, снимают спортивные события, отслеживают автомобильные пробки. Беспилотные самолёты ведут поиск людей, обнаруживают пожары в тайге и, конечно, решают задачи разведки. Во всех перечисленных случаях очень важно решить проблемы стабилизации измерительной аппаратуры. Появление доступных цифровых видеокамер небольшого размера, миниатюризация электронных компонентов, широкие возможности использования GPS/ГЛОНАСС навигации, развитие беспилотных летательных аппаратов, потребность работать с видеоизображением в режиме реального времени, желание сократить стоимость часа полёта, необходимость гасить колебания камеры, – привели к задаче создания системы стабилизации и управления видеокамерой беспилотного самолёта малого типа. Данная работа посвящена созданию системы стабилизации видеокамеры беспилотного самолёта со взлётной массой не более 15 кг. Теоретические исследования для успокоения колебаний измерительных устройств были проведены достаточно давно [2]. Сейчас в связи с развитием теории робастного управления полученные результаты уточняются [3]. В настоящей работе использованы принципы стабилизации с использованием ПИД-регуляторов. Постановка задачи На момент принятия решения о разработке на отечественном рынке существовали только БПЛА с жёстко зафиксированной полезной нагрузкой (видеокамерой или фотоаппаратом). В этом случае самолёт не может вести продолжительное наблюдение с малых высот за заданным объектом на земной поверхности и ему приходится совершать повторные заходы на цель. Возможности видеосъёмки также требовалось улучшить за счёт большого диапазона углов, на которые может поворачиваться камера относительно самолёта. При этом важно было обеспечить режим, в котором камера способна вести съёмку даже в верхней полусфере самолёта при углах до +20° над горизонтальной плоскостью, в то время как на большинстве БПЛА камера обозревает только нижнюю полусферу. Основная задача состояла в сохранении видеокамерой, установленной на борту беспилотного самолёта, заданного направления при его маневрировании в воздухе. Т.е. при изменении со временем углов крена, рыскания и тангажа камера должна снимать фиксированный квадрат земной поверхности. Требуется выполнять видеонаблюдение объекта, задача картографирования не ставится. Для решения поставленной задачи было выполнено следующее: | - | выбран контроллер, датчики положения и ускорения; | | - | создана материнская плата с необходимыми вводами и выводами; | | - | разработана математическая модель движения самолёта, алгоритмы и программы управления положением видеокамеры; | | - | реализованы режимы наблюдения «По направлению», «По курсу» и «Отслеживание точки»; | | - | обеспечена возможность изменения параметров видеосъёмки: диафрагмы, выдержки, фокусного расстояния и др.; | | - | выдержаны заданные массово-габаритные характеристики; | | - | предоставлены оператору функции управления видеокамерой в режиме реального времени. |
Аппаратная часть системы и её характеристики Блок видеокамеры встроен в фюзеляж самолёта. Блок состоит из двух электрических двигателей, задающих угловое положение видеокамеры, печатных плат с контроллером, датчиков инерциальной системы и положения, видеокамеры. Всё устройство целиком помещается в цилиндр с диаметром основания 15 см и высотой 15 см. Между блоком и бортовым компьютером идёт непрерывный обмен данными. Структурная схема системы приведена на Рис. 1. Рассмотрим её отдельные компоненты. 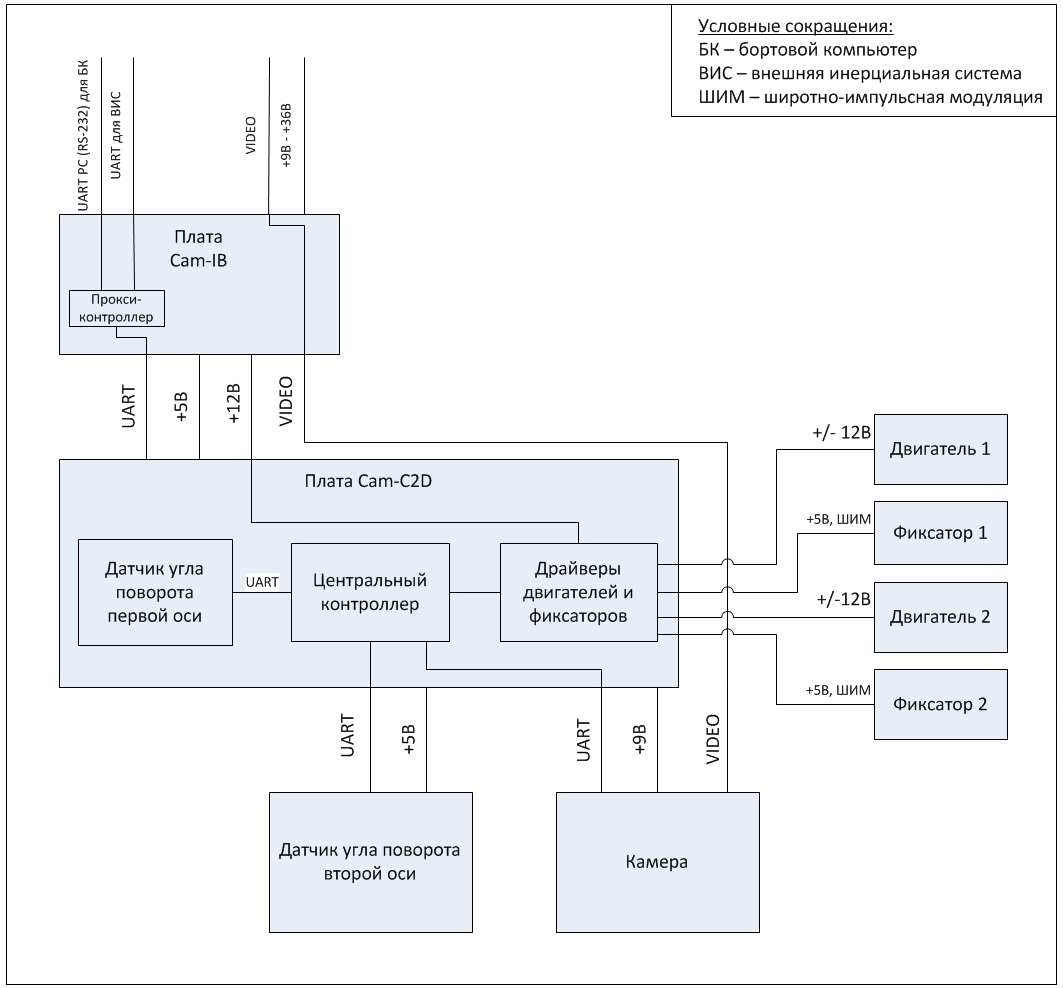 Рис. 1: Структурная схема системы
Видеокамера – главный компонент системы. К ней предъявляются следующие требования: малые размеры, высокая кратность зум-объектива, наличие интерфейса для удалённого управления. Корпус, видоискатель, кнопки управления и другие компоненты видеокамеры на БПЛА не нужны. Необходимы только модули камеры и питания, причём питание идёт от бортового источника. Поэтому в дальнейшем под камерой понимается только модуль камеры и ничего больше. В проекте использован HD Color Camera Module GP-MH310 фирмы Panasonic (рис. 2).  Рис. 2: Модуль высокого разрешения цветной видеокамеры Panasonic GP-MH310 Его основные характеристики: - Прогрессивный MOS 1/2.5 сенсор изображения, 4M эффективных пикселей.
- Форматы видео: 1080/59.94p, 50p, 59.94i, 50i, 29.97p, 25p и другие.
- Минимальная освещённость: 2.0 лк (Color), 0.1 лк (B/W) на F1.8 (50IRE).
- 10-кратное оптическое увеличение с автофокусировкой: фокусное расстояние f=6.3мм до 63мм (видео).
- 16-кратное цифровое увеличение: до 160-крат с оптическим увеличением.
- Видеовыход: LVDS, AnalogComponentY/Pb/Pr, Y/C, Composite (for adjustment).
- Управление видеокамерой через интерфейс UART (уровень CMOS).
- USB-интерфейс.
- Геометрические размеры 43.7x44.2x75.2мм ( 1-23/32 x 1-3/4 x 2-31/32 дюймов ).
- Рабочая температура –10°C ∼ +50°C (14°F ∼ 122°F).
Следует отметить, что стандарты армий НАТО давно предусматривают использование в БПЛА цифрового видео повышенной чёткости с прогрессивной развёрткой [4]. Поэтому изначально выбор был сделан в пользу камер с технологией FullHD, чтобы в будущем ни в чём не проигрывать конкурентным разработкам. Камера реагирует на следующие команды, подаваемые центральным контроллером: включение/отключение питания камеры; управление трансфокатором камеры; выбор режима замера экспозиции (приоритет выдержки, приоритет диафрагмы, авто); установка режимов фокусировки: автофокусировка, фокусировка на бесконечность, однократная фокусировка; экспокоррекция; задание надписей на изображении. Решена задача точного позиционирования головки видеокамеры при ограничениях на выбор привода, его размеры и вес. Чтобы выполнить малые перемещения шаговыми двигателями, необходимо использовать редукторы. Это увеличивает размеры конструкции, а наличие механических деталей ухудшает её эксплуатационные качества. При этом достичь удовлетворительной скорости вращения не удаётся. Но это не основные проблемы, которых следует избегать. Главное – сделать камеру инерционно-независимой от самолёта, чтобы его резкие манёвры в воздухе оказывали минимальное воздействие на угловое положение видеокамеры в инерциальной системе координат (СК). Поэтому была выбрана технология, хорошо зарекомендовавшая себя в накопителях на жёстких магнитных дисках для позиционирования головок чтения/записи. Вращение головки видеокамеры вокруг каждой оси осуществляется малоинерционным соленоидным высокоточным двигателем. В созданном специально для этой задачи двигателе соленоид при подаче на него постоянного тока втягивает (вращает) пропущенное через него металлическое разомкнутое кольцо, концы которого замыкают постоянный магнит. На самом кольце размещается головка видеокамеры. Таким образом достигается повышенная точность и скорость её позиционирования. Другими немаловажными факторами являются низкое потребление энергии, высокая надёжность и ударопрочность конструкции. При штатной установке головки, первая ось вращения направлена по курсу самолёта, вторая – ей перпендикулярна. Соответственно, при горизонтальном положении самолёта, поворот относительно первой оси соответствует изменению крена камеры (при второй оси в нулевом положении), относительно второй оси – изменению тангажа (при первой оси в нулевом положении). Т.о. у камеры есть две степени свободы относительно самолёта. Диапазон изменения углов по первой оси: ±180°, по второй оси – от +20° до –120°. Фиксация головки обеспечивается за счёт штока, который ложится на выступающие части кольца с установленной видеокамерой. Перемещает шток сервопривод. Фиксация видеокамеры необходима для уменьшения потребления энергии на её позиционирование и сохранения безопасного положения при взлёте и посадке. Управляет двигателями, видеокамерой и другой аппаратурой центральный контроллер. Дополнительный контроллер (прокси-контроллер) позволяет разгрузить центральный, обрабатывая данные от датчиков положения, угла поворота и внешней инерциальной системы. Получение первичных данных идёт с двух датчиков положения, размещённых в перпендикулярных плоскостях и находящихся на двух печатных платах. В результате на первой плате установлены датчик положения и центральный контроллер, на второй – датчик положения, на третьей (интерфейсной) – прокси-контроллер и источник питания. Разместить прокси-контроллер на первой плате не удалось из-за габаритных ограничений. В то же время, указанное расположение позволяет сократить количество соединительных проводов между платами, ведь даже самые гибкие провода пружинят и вызывают сопротивление перемещению головки видеокамеры. Определяет угол поворота камеры по каждой оси датчик Холла Sentron 2SA-10. Микроконтроллер преобразует аналоговые сигналы с датчика 2SA-10 в абсолютный угол, вычисляет угловую скорость и передаёт данные в цифровом виде через интерфейс UART на центральный контроллер с частотой не менее 1 кГц. Формулы расчёта углового положения и скоростей приведены в следующих разделах. Калибровочные характеристики датчиков хранятся в энергонезависимой памяти контроллеров и не нуждаются в изменении в режиме нормального использования (должны делаться в заводских условиях). Калибровка датчиков должна производиться после каждой сборки/разборки конструкции головки. Калибровочные характеристики задаются в виде таблиц, в столбцах которых стоят измеренные и реальные значения углов (по 19 строк таблицы для каждой оси вращения головки камеры). Внешняя инерциальная система имеет полный набор датчиков для навигации самолёта: гироскоп, акселерометр, магнитометр, приёмник GPS-сигнала. С их помощью определяется положение самолёта в воздухе и его географические координаты. Все необходимые данные передаются с частотой 1 кГц в центральный контроллер двухосевой головки. Нулевое направление и положение горизонтальной плоскости фиксируется при подаче питания и далее корректируется при получении команд от центрального контроллера. | Плата центрального контроллера выполняет следующие функции: | | 1. | Управление приводами осей (обеспечение углов поворота осей с помощью ПИД-регулятора). | | 2. | Управление сервоприводами фиксаторов осей. | | 3. | Измерение угла поворота первой оси (имеет в своём составе интегрированный вариант платы датчика угла поворота). | | 4. | Приём данных с датчика угла поворота второй оси. | | 5. | Приём данных с датчика инерциальной системы. | | 6. | Реализацию вычисления требуемых углов поворота осей для выдерживания заданного углового положения линии визирования. | | 7. | Управление камерой (поддерживаются камеры SONY и PANASONIC). |
Питание подводится к интерфейсной плате. Пространство на плате, отведённое под монтаж преобразователей питания, позволяет устанавливать питающие устройства разной мощности, но схожих габаритов. На интерфейсной плате находится разъём для подключения внешней вычислительной системы, обмен данными с которой осуществляется через интерфейс UART. | Интерфейсная плата выполняет следующие функции: | | 1. | Преобразование напряжения из 9-36В в 5В и 12В. | | 2. | Приём данных прокси-контроллером (контроллером интерфейсном платы) с внешней инерциальной системы и команд управления от бортового компьютера или преобразователя команд пульта дистанционного управления. | | 3. | Передачу данных прокси-контроллером команд управления на плату центрального контроллера. | | 4. | Реализацию режимов наблюдения «По направлению», «По курсу» и «Отслеживание точки». |
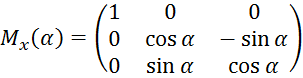
Режимы аэровидеосъёмки, осуществляемые системой Видеокамера способна отслеживать как неподвижные, так и перемещающиеся объекты. Предусмотрены три режима: «Отслеживание точки», «По направлению» и «По курсу». В режиме «Отслеживание точки» видеокамера всегда направлена на точку, заданную широтой, долготой и высотой. В этом режиме можно произвести осмотр объекта наблюдения с разных сторон (рис. 3). Если объект движется, то нужно задавать камере новые координаты точки. 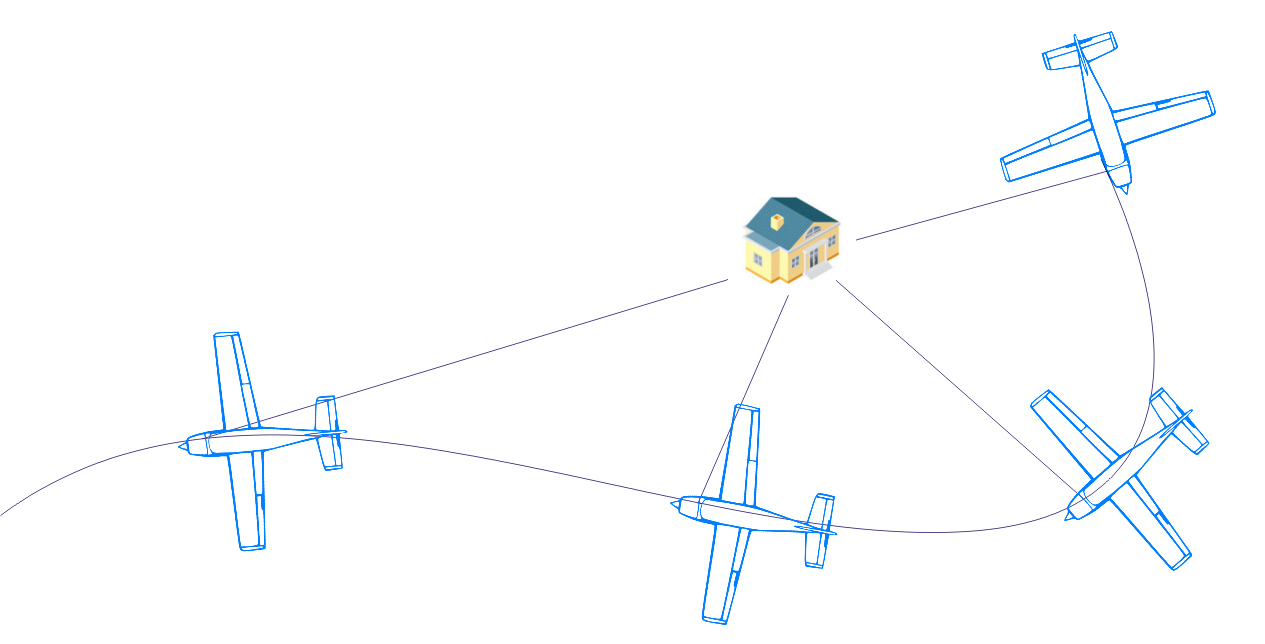 При получении команды «Перейти в режим «По направлению» контроллер устанавливает угловое положение головки по заданному направлению в системе координат, связанной с землёй. Т.о. вектор, заданный в абсолютной СК, будет совпадать с линией визирования. Этот вектор следует за самолётом, и точка его приложения постоянно перемещается по земной поверхности. С помощью этого режима можно лететь вдоль своей границы и заглядывать на чужую территорию. В режиме «По курсу» контроллер устанавливает положение головки по текущему курсу самолёта и переходит в режим «По курсу»: будет удерживать заданный курс и корректировать угловое положение линии визирования, «плавно» отслеживая изменения курса самолёта. Режим позволяет видеть всё, что находится перед самолётом. Программная часть системы Программное обеспечение отвечает как за работу всей системы, так и за обмен данными с бортовым компьютером. На центральном контроллере и прокси-контроллере исполняются программные модули, отвечающие за расчёт углового положения видеокамеры, управление угловым положением, управление непосредственно видеокамерой, обмен данными с внешней вычислительной системой, установку настроек и калибровку датчиков. Переход от СК, связанной с землёй (абсолютной СК), к СК, связанной с самолётом (инерциальной СК), выполняется с помощью известных матриц поворота точек вокруг координатных осей [5]. Преобразования требуются для установки линии визирования камеры, движущейся вместе с самолётом, по заданному в абсолютной СК вектору. - Вращение вокруг оси x на угол α (приведена матрица поворота от результирующей системы координат к исходной):
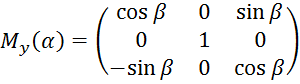
 - Вращение вокруг оси y на угол β (приведена матрица поворота от результирующей системы координат к исходной):
 - Вращение вокруг оси z на угол γ (приведена матрица поворота от результирующей системы координат к исходной):
 Матричные вычисления реализованы на базе готовой математической библиотеки, которая поставляется в комплекте с датчиком углового положения. Направление видеокамеры задаётся в абсолютной СК, а устанавливать её угловое положение необходимо в инерциальной относительно самолёта. Для этого решается система тригонометрических уравнений. Т.к. камера способна вращаться только относительно двух осей, что является конструктивным ограничением, то камеру нужно повернуть на два угла для установки её по заданному направлению. Для нахождения искомых углов приведём единичные векторы  и направления и направления  к общему началу. Вектор задан в абсолютной СК, вектор к общему началу. Вектор задан в абсолютной СК, вектор  – в СК, связанной с самолётом. Далее перемножим две матрицы поворота и вектор . В результате требуется получить вектор . – в СК, связанной с самолётом. Далее перемножим две матрицы поворота и вектор . В результате требуется получить вектор .  . . Для нахождения углов α и γ необходимо решить систему из трёх получившихся тригонометрических уравнений с двумя неизвестными. У неё существует два аналитических решения. На выбор решения влияют ограничения, связанные с предельными значениями угла поворота головки видеокамеры, а также учёт шума. Для понимания проблемы достаточно представить горизонтальную плоскость и ситуацию, когда камера должна быстро смотреть то под плоскость, то над плоскостью. Если камера может свободно вращаться вокруг своей оси, то проблем нет. Но с появлением ограничений на предельные углы поворота камеры, например, ±5°, ситуация меняется. Тогда, чтобы камере перейти из положения -5° в положение +5°, нужно повернуться не на угол 10°, а на 170°. Разумеется, таких вращений нужно избегать, т.к. во время перехода на картинке ничего не видно и сам переход очень энергозатратен. Но один раз задать углы установки видеокамеры мало, нужно постоянно корректировать её направление. Для этого на головку видеокамеры установлен сенсор углового положения Sentron 2SA-10. При подаче питания микроконтроллер в цикле производит измерения выходных каналов X_OUT, Y_OUT и O_OUT с сенсора Sentron 2SA-10, на основе которых вычисляет значение синуса и косинуса угла поворота φ по формулам:  , ,
 , ,
 , ,
 . . Далее с помощью обратных тригонометрических функций вычисляется значение самого угла φ, производится его усреднение и находится оценка  угловой скорости по последним 16 (N=16) измерениям с помощью метода наименьших квадратов для линейной функции, по формулам: угловой скорости по последним 16 (N=16) измерениям с помощью метода наименьших квадратов для линейной функции, по формулам:  , ,
 , ,
 , ,
 , ,
 , ,
 , , где  – i-й момент времени, – i-й момент времени,  – исходное значение угла, вычисленное в i-й момент времени, – исходное значение угла, вычисленное в i-й момент времени,  . На основе проведённых вычислений формируется пакет текущих измерений, передаваемый через интерфейс UART во внешнюю систему. После отправки пакета процесс повторяется. . На основе проведённых вычислений формируется пакет текущих измерений, передаваемый через интерфейс UART во внешнюю систему. После отправки пакета процесс повторяется. Ещё одной важной решённой задачей была организация обмена данными между различными подсистемами. Внешняя вычислительная система является центральным компьютером, от которого поступают команды управления видеокамерой и который передаёт информацию от датчиков положения самолёта и системы GPS в центральный контроллер системы. Обмен данными между прокси-контроллером и внешней системой осуществляется со скоростью 115200 бит/с (8-N-1) в полудуплексном режиме (контроллер отвечает на запросы). Обмен данными между контроллерами производится со скоростью 1000000 бит/с (8-N-1). Все ответы выдаются после обработки команды. Для команд, подразумевающих длительный переходной процесс, под обработкой понимается проверка переданных параметров и принятие новых целей, необходимые расчёты (в любом случае обработка занимает менее 1 мс). Если в процессе выполнения команды поступает другая команда, контроллер сначала отвечает на текущую команду, потом переходит к обработке следующей. Если следующая команда по сути подразумевает отмену предыдущих (например, задано новое угловое положение видеокамеры), то контроллер отменяет выполнение предыдущей команды и начинает выполнение новой. Пакет данных состоит из кода команды, блока данных и контрольной суммы. Заводская настройка и калибровка осуществляется с помощью специально разработанного программного обеспечения. Функциональность программы очень простая: связаться с центральным контроллером и считать/записать параметры, заданные в табличном виде. Настройки центрального контроллера хранятся в энергонезависимой памяти контроллеров и не нуждаются в изменении в режиме нормального использования (должны делаться в заводских условиях). Настройки включают в себя: 15 характеристик автоматических регуляторов (коэффициенты ПИД-регулятора, дискретность управления и др.); 6 характеристик, связанных с конструкцией системы стабилизации и управления; 4 характеристики, отвечающие за коммуникационные настройки. Настройки прокси-контроллера хранятся в энергонезависимой памяти контроллеров и не нуждаются в изменении в режиме нормального использования (должны делаться в заводских условиях). Настройки включают в себя: характеристики режимов «По направлению», «По курсу», коммуникационные характеристики. Алгоритм управления головкой видеокамеры | После перехода в один из трёх режимов видеонаблюдения система управления должна выдерживать заданное угловое положение головки видеокамеры. Алгоритм работы центрального контроллера и системы управления включает 5 шагов. | | Шаг 1. | Центральному контроллеру получить информацию с датчиков углового положения и гироскопов. | | Шаг 2. | Центральному контроллеру вычислить матрицы поворота для перехода от бортовой системы координат к инерциальной. | | Шаг 3. | Центральному контроллеру отправить углы из матриц поворота и значения скоростей вращения приводов в ПИД-регулятор. | | Шаг 4. | ПИД-регулятору обработать углы и скорости, выдать управляющее воздействие на привод головки видеокамеры. | | Шаг 5. | Повторять п. 4-5 с частотой 1 кГц. | Перечисленные шаги осуществляются до перехода системы в другой режим видеонаблюдения. Сравнительные характеристики Разнообразие беспилотных летательных аппаратов настолько велико, что даже их отдельный обзор весьма интересен [6]. В статье «List of unmanned aerial vehicles» [7] перечислено более 1000 БПЛА, созданных в разных странах мира. Разумеется, в этот список попали ЛА самолётного и вертолётного типов, винтовые и реактивные, лёгкие и тяжёлые. Самолёты со взлётной массой до 15 кг в основном ориентированы на задачи картографирования местности, мониторинг производится статичными камерами [8]. Однако на рынке имеется продукция компании «ZALA AERO GROUP» [9], с очень похожим функционалом. Подробного описания использованных технологий на сайте не представлено, поэтому часть характеристик сравнить не удалось. По габаритным, весовым, оптическим параметрам системы схожи. Однако созданная система позволяет стабилизировать камеру по тангажу от +110° до -30° при крене ± 180°, а модель ZALA Z-16ВКHD - по тангажу от +75° до -45° при крене ±175°. Углы тангажа здесь отсчитываются от местной вертикали. Т.о созданная система позволяет вести съёмку вдоль продольной оси самолёта и обозревать верхнюю полусферу. Испытания системы проводились в Истринском районе Московской области. Работоспособность системы проверялась на наземном стенде в течение 5-ти часов непрерывной работы. Далее весь комплекс проходил лётные испытания на беспилотном самолёте со взлётной массой до 15 кг суммарной продолжительностью 10 часов. Выполнена видеосъёмка наземных объектов в различных режимах наблюдения. Заключение Результатом работы является созданная система стабилизации и управления видеокамерой для проведения аэровидеосъёмки с борта беспилотного летательного аппарата массой до 15 кг. Проведённое тестирование и лётные испытания подтвердили работоспособность системы. Она позволяет вести наблюдение людей, техники, зданий (в том числе осуществлять их поиск) на открытой местности и в труднодоступных районах. Дальнейшее направление работы видится в области обработки изображения, полученного с видеокамеры, например, для распознавания образов и автоматического принятия решений в процессе полёта в режиме реального времени. Так, если заранее известно, что объект наблюдения имеет характерные контуры, то подсистема распознавания образов может корректировать направление видеокамеры с целью расположения объекта в центре кадра. Распознавание образов может служить для коррекции ошибок навигационных систем путём сравнения двух соседних кадров и задания правильного направления видеокамеры. Особенно это становится актуальным при наблюдении за подвижными объектами. Список использованных источников: | 1. | Левкевич М. Аэрофотосъёмка станет доступной благодаря беспилотникам, http://www.cnews.ru/reviews/?2014/07/14/579432, дата обращения 02.09.2015 | | 2. | Ривкин С.С. Стабилизация измерительных устройств на качающемся основании // М.: Наука — Физматлит, 1978, 320 стр. | | 3. | Sushchenko O.A. Design of robust controller for UAV information-measuring devices stabilisation system // Electronics and Control Systems 2013. № 3(37) p. 58-64. | | 4. | Слюсар В. Передача данных с борта БПЛА: стандарты НАТО // Электротехника: Наука, Технология, Бизнес, 3/2010, стр. 80-86. | | 5. | Ильин В.А., Позняк Э.Г. Линейная алгебра, М.: Наука — Физматлит, 1999. 296 стр. | | 6. | Каримов А.Х. Возможности беспилотных авиационных систем следующего поколения // Электронный журнал «Труды МАИ», 2011, выпуск № 47, 11 стр. http://www.mai.ru/science/trudy/published.php?ID=26552, дата обращения 02.09.2015 | | 7. | List of unmanned aerial vehicles // http://en.wikipedia.org/wiki/List_of_unmanned_aerial_vehicles, дата обращения 02.09.2015 | | 8. | Смирнов А. Сводная таблица характеристик БПЛА самолетного типа // http://съемкасвоздуха.рф/17-blog-blog/75-obzor-samoletnykh-bpla.html, дата обращения 02.09.2015 | | 9. | Web-сайт компании «ZALA AERO GROUP» http://zala.aero, дата обращения 02.09.2015 |
Материлы проекта опубликованы в журнале «Труды МАИ». |



